










































Hot search keywords: Specific product model Fuzzy model query Adsorption video display


+86-512-68781842

Hot search keywords: Specific product model Fuzzy model query Adsorption video display
In recent years, with the continuous expansion of the production scale of the automation industry, many imported advanced equipment have been introduced. The handling manipulator made of vacuum suction cups has been applied in a group of automatic loading and unloading manipulator of plate sanding machine imported from Italy. This handling manipulator occupies a small space and is flexible and reliable in handling large-area titanium plates. The whole device is fully automatic and has high work efficiency. In order to improve the product quality and expand the production scale, and at the same time, in view of the shortcomings of the original imported equipment, such as insufficient air pressure, the suction cup is not free from the plate material, in early 2006, on the basis of the original equipment, the handling manipulator composed of vacuum suction cups was successfully developed.
1. Specification of titanium plate handled by manipulator
0.8-6 mm thick; 2000 ~ 3050 mm long; 900-1000 mm wide; The maximum mass is 85 kg.
2. Mechanical structure and working process of manipulator
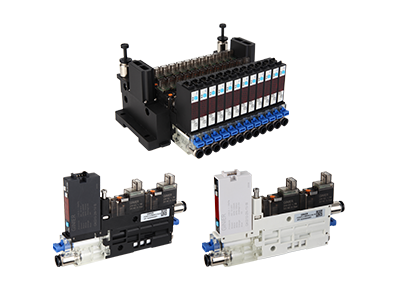
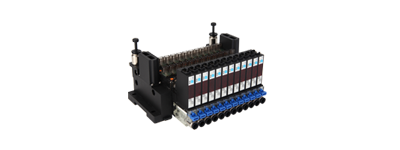
The vacuum system is mainly composed of vacuum pump, vacuum suction cup, vacuum soft pipe, electromagnetic reversing valve, vacuum switch, vacuum filter, etc. The suction cup bracket is mainly composed of a profile steel frame, two aluminum profiles and two rows of 16 vacuum suction cups installed on it. The lifting system is driven by the motor, reducer and transmission chain to realize the lifting and lowering of the suction cup bracket. The structure of the manipulator is shown in Fig. 1.
The rotation system relies on the motor, reducer and transmission gear on the column and base to drive the suction cup bracket to rotate.
The two manipulators are arranged on the left and right side of the main machine. One manipulator lifts the titanium plate from the material rack, rotates it 180 °, puts it down, and enters the roller table of the main machine; Another manipulator lifts the titanium plate from the roller table, rotates it 180 ° and drops it. Then, the titanium plate is placed on another material rack for the loading and unloading of the main machine.
3. Selection and calculation of vacuum suction cups
3.1 selection of vacuum degree
In terms of handling technology, low vacuum can meet the requirements. Generally, the pressure range of low vacuum is 100 Pa to 1 standard atmospheric pressure. For handling materials with airtight surfaces such as metals and plastics, the vacuum degree is usually between 50000 and 80000 PA, and it is not economical to use a medium high vacuum higher than 100 PA. Because it takes a long time for the suction cup to absorb the plate material, and considering the safety factor, the vacuum pump with a much larger pumping flow than the vacuum generator is selected.
3.2 selection of vacuum suction cups
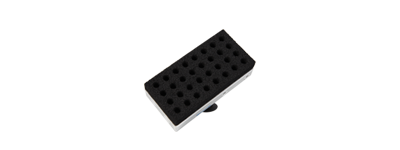
Firstly, the vacuum suction cups of this equipment must be determined. After many inquiries, no suitable domestic suction cups have been found. The suction cups produced by some domestic manufacturers can only be used to absorb light and soft articles such as paper and plastic film. Therefore, the vacuum suction cups made in Taiwan are selected. The material is selected as NBR, mainly considering its low price and suitable for handling workpieces with smooth surface. Select the sample according to the suction cup and calculate the total force F borne by the suction cup:
F=m × (g+a/ μ) × S (1) where f - theoretical maximum suction, N; M - mass of titanium plate, kg; G - gravitational acceleration, M / S2; A - acceleration of lifting system, M / S2; μ— Friction coefficient, 0.2 ~ 0.5; S - safety factor, 1.5 ~ 2.
F = 85 × (918 + 5/ 014) × 2 = 3791 N
The force that the suction cup can bear is calculated according to the sample. When the vacuum degree of pfyn95 suction cup is 60kpa, the force that a single suction cup can bear is 350 n. according to the structural layout, 16 suction cups are selected, with a total force of 516 kn.
4. Manipulator automatic control program
S7-200 programmable controller produced by Siemens is selected as the automatic control program. When the manipulator starts working, first turn on the vacuum pump. The feeding process is as follows:
(1) The suction cup bracket drives the two rows of suction cups to drop rapidly. After the adjustable photoelectric switch detects the sheet material, it slowly drops to 50mm. The suction cup touches the sheet material and the suction cup bracket touches the limit switch at the same time;
(2) The two position three-way solenoid valve starts to operate, and the suction cup is connected to the vacuum for about 1-2s. When the vacuum switch detects that the vacuum value is 60-80 kPa (the sample parameter of the suction cup), confirm that the sheet has been sucked firmly;
(3) Quickly lift, touch the first limit switch, the suction cup will move slowly, touch the second limit switch (about 200 mm at this time), and stop in place;
(4) Rotate quickly, touch the first limit switch, the suction cup will move slowly, touch the second limit switch, and stop in place (rotate 180 °);
(5) Rapidly descend, touch the first limit switch, the suction cup will move slowly, touch the second limit switch, and stop in place (about 200mm);
(6) The electromagnetic reversing valve reverses direction and releases air. The suction cup is separated from the sheet material and falls on the roller table of the main machine. The photoelectric switch on the roller table sends a signal;
(7) The suction cup bracket drives the suction cup to rise rapidly and reach the position slowly (about 200 mm high);
(8) Fast and slow rotation 180 ° and stop. So far, this automatic feeding action is completed.
The programming can realize cyclic and repeated feeding, and can also be manually controlled, single automatic and random feeding, or inching to stop the suction cup bracket at any position. An alarm limit switch is installed at the rear position of limit switches such as ascending, descending and rotating, as a backup switch to prevent failure of stop in place. During unloading, the action procedure of the manipulator is similar to that during loading, except that the starting position is to take materials from the roller table of the main machine and finally place the materials on the material rack.
5. Conclusion
The successful development of this moving manipulator saves the funds of imported equipment, and improves the old imported equipment, which is more suitable for the actual production situation. The two position three-way electromagnetic reversing valve on the original imported equipment has two stations, one is connected to vacuum and the other is connected to compressed air. It needs to be equipped with an air storage tank and a connected gas transmission pipeline. When the air pressure is insufficient, the suction cup will be disconnected from the plate. The newly developed handling manipulator eliminates the air storage tank and connecting pipeline, directly exhausts the atmosphere, fully meets the production requirements, and is more convenient for equipment manufacturing.
The disadvantages of this handling manipulator are: the torque of the reducer selected for lifting the suction cup support is not enough, and the suction cup support cannot be inched up and down frequently, with an interval of 5-7s; If the interval is too short, the band brake will fail during inching. These problems need further improvement in the future.
【本文标签】
【Responsible editor】超级管理员
+86-13913598139 & +86-512-68781842
sales@gnr-tech.com
No. 25, Muqiao street, Suzhou high tech Zone

 Wechat QR code
Wechat QR code
 Mobile phone QR code
Mobile phone QR code


